



Description
For Unreal Engine 5.6+ projects, Pose Editor (part of MetaHuman for Maya) replaces the use of Pose Driver Connect in some use cases.
If you are using MetaHuman Creator in Unreal Engine 5.6+, or are using UERBFSolvers for secondary deformation in an Unreal Engine 5.6+ project, you should use Pose Editor instead of Pose Driver Connect. Consult the Frequently Asked Questions on this listing for more information.
Pose Driver Connect remains available for editing RBF data in existing projects that aren’t using MetaHuman DNA or RigLogic, or that require features not currently supported by MetaHuman DNA.
This plugin consists of two tools: PoseWrangler and Pose Driver Connect.
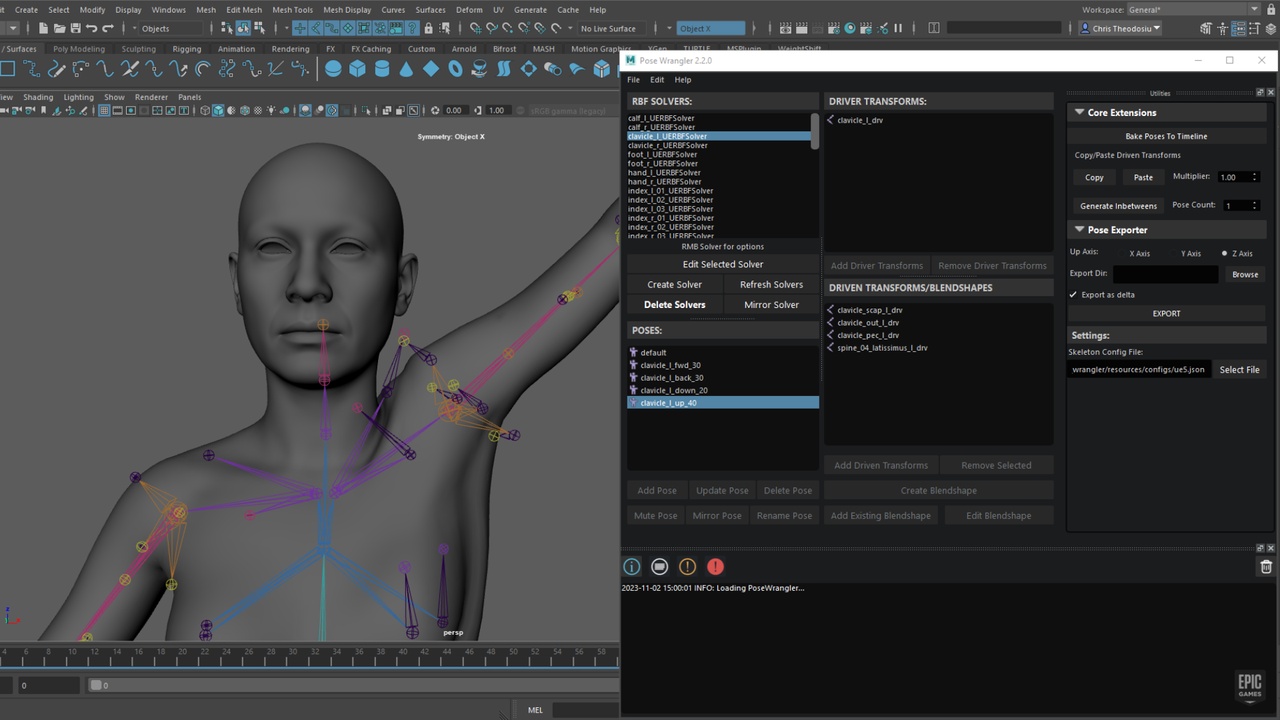
PoseWrangler is a Maya Python tool for interfacing with the MayaUERBFPlugin. The RBF plugin allows users to author complex secondary animation in Maya leveraging a driver/driven relationship to smoothly blend between a number of poses or transformations.
For example, to fix problematic areas of deformation—such as shoulders, elbows, thighs, and knees—you can create a list or set of poses and tweak the secondary joint transformations to correct the deformations in each pose.
PoseWrangler provides a Python API and user interface to simplify the creation and management of RBF setups, and to export the RBF data to intermediate files that Pose Driver Connect can read inside Unreal.
Pose Driver Connect is a C++ Unreal plugin that can take the exported data from PoseWrangler and create a network of PoseDrivers in an existing AnimBlueprint,resulting in secondary deformation that matches one-to-one with the deformation authored in Maya.
Requires interchange to be enabled for fbx importing from 5.5 onwards.